機械手
|
夾具缸 WDHA |
||
|
|
作動方式 |
複動型 |
|
氣缸內徑(mm) |
12,16,20,25,32 |
|
|
配管口徑尺寸 |
M3×0.5, M5×0.8 |
|
|
使用流體 |
空氣 |
|
|
使用壓力範圍 |
1.5~7(0.15~0.7)kgf/cm2(MPa) |
|
|
最高作動頻率 |
180 次/分鐘 |
|
|
周圍溫度 |
-5℃~+60℃ (不凍結) |
|
|
給油 |
氣缸:不需給油 |
|
|
最大爪臂長度(L) |
30~85 |
|
|
夾爪開關角度 |
-10~30° |
|
|
理論把持力距kgf-cm |
閉側:0.4×P~6.1×P |
|
|
有效把持力距(F) |
F=M/L×0.85(M:理論把持力距L:爪臂長度) |
|
|
感應開關 |
RCE, RCE1 |
|
|
重量 |
53g~525g |
|


|
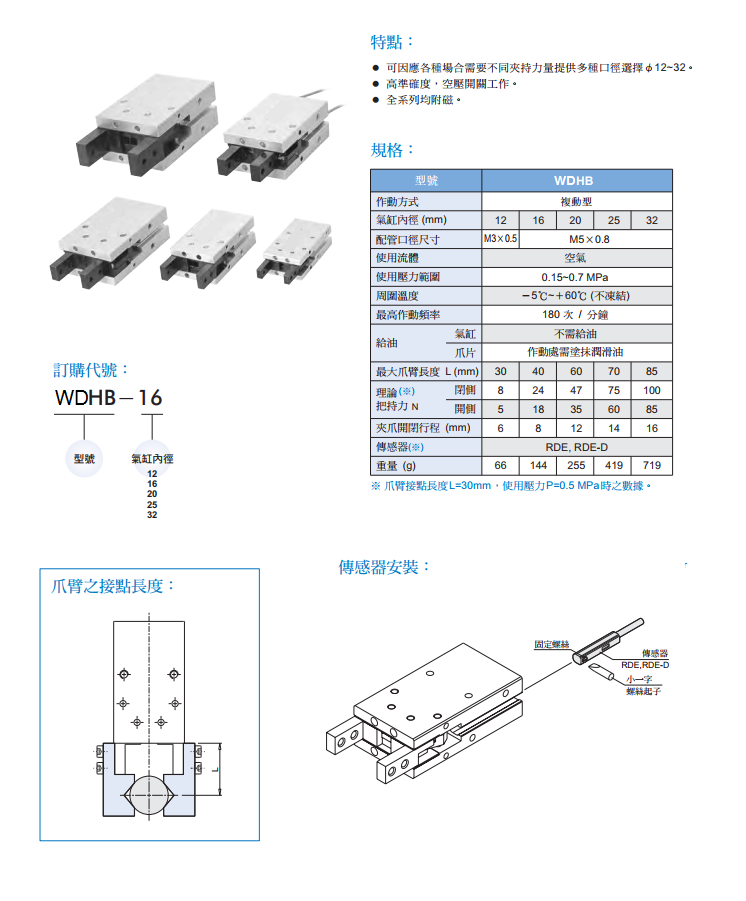
平行夾爪 WDHB |
||
|
|
作動方式 |
複動型 |
|
氣缸內徑(mm) |
12,16,20,25,32 |
|
|
配管口徑尺寸 |
M3×0.5, M5×0.8 |
|
|
使用流體 |
空氣 |
|
|
使用壓力範圍 |
1.5~7 kgf/cm2 |
|
|
最高作動頻率 |
180 次/分鐘 |
|
|
周圍溫度 |
-5℃~+60℃ (不凍結) |
|
|
給油 |
氣缸:不需給油 |
|
|
最大爪臂長度(L) |
30,40,60,70,85 mm |
|
|
理論把持力距kgf-cm |
閉側:0.8~10 |
|
|
夾爪開閉行程 |
6,8,12,14,16 mm |
|
|
有效把持力距(F) |
F=M/L×0.85(M:理論把持力距L:爪臂長度) |
|
|
感應開關 |
RCE, RCE1 |
|
|
重量 |
68g, 144g, 255g, 419g, 719g |
|

|
超薄三爪機械手 WDHG |
||
|
|
行程(mm) |
8~26 |
|
作動方式 |
複動型 |
|
|
缸體內徑(mm) |
32~96 |
|
|
使用流體 |
空氣3~7 kgf/cm2 |
|
|
精度 |
0.05 |
|
|
給油 |
不需給油 |
|
|
重量 |
230g~2400g |
|
|
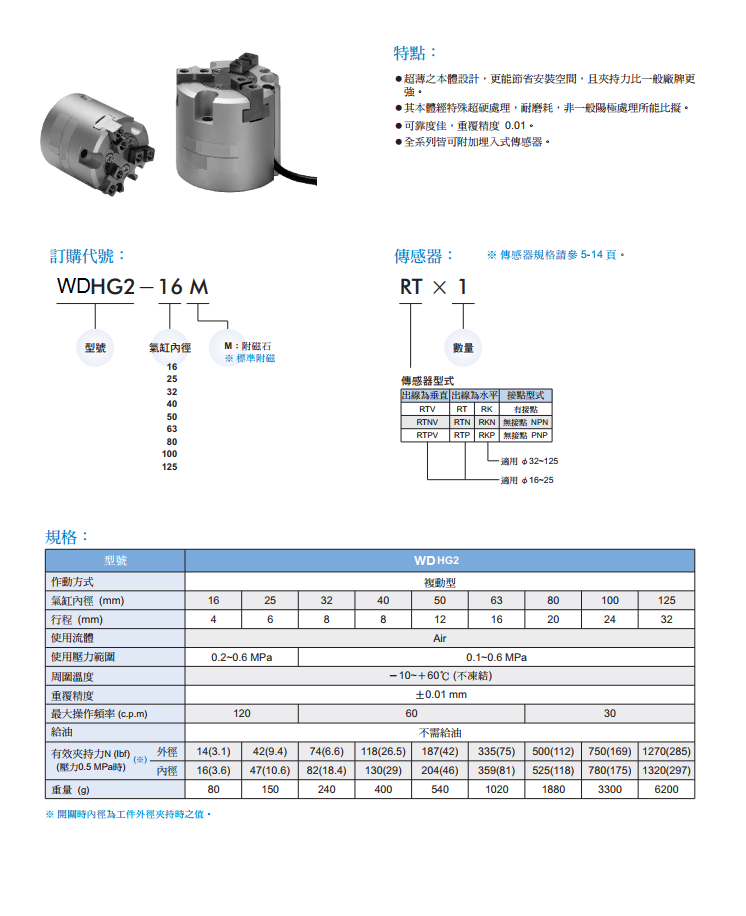
超薄三爪機械手 WDHG2 |
||
|
|
行程(mm) |
4, 6 |
|
作動方式 |
複動型 |
|
|
缸體內徑(mm) |
16, 25 |
|
|
使用流體 |
空氣1~7.1 kgf/cm2 |
|
|
周圍溫度 |
-5℃~+60℃ (不凍結) |
|
|
給油 |
不需給油 |
|
|
重覆精度 |
±0.02 |
|
| 夾持力(壓力5.1kgf/cm2時) | 14N(1.4kgf), 42N(4.3kgf) | |
| 重量 | 800g,1400g | |

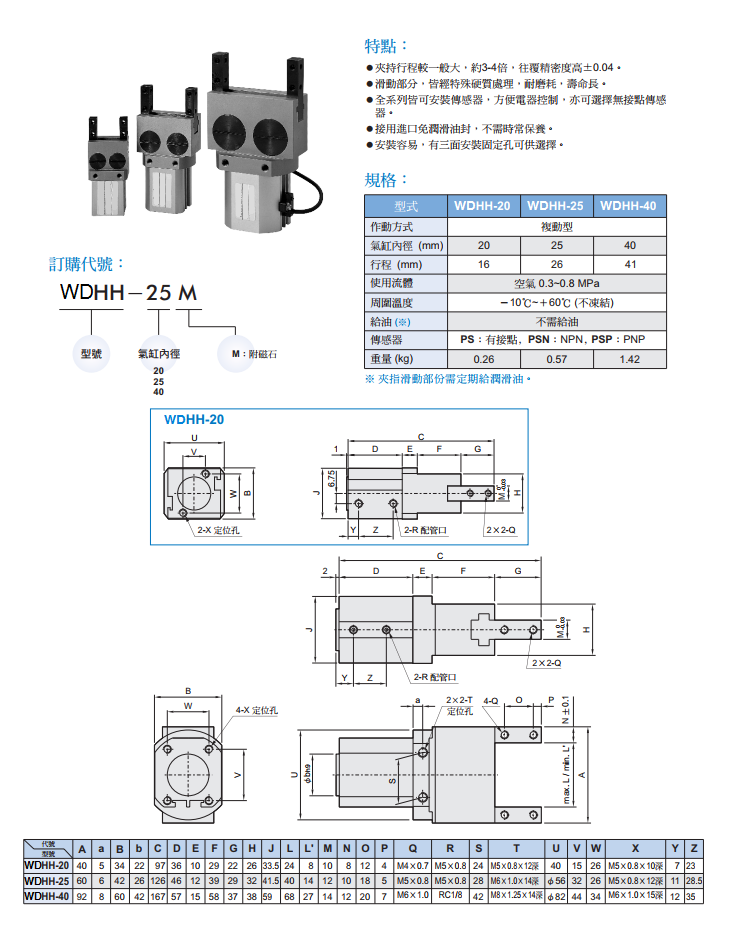
| 平行機械手 WDHH | ||
|
|
行程(mm) |
16, 26, 41 |
|
作動方式 |
複動型 |
|
|
缸體內徑(mm) |
20, 25, 40 |
|
|
使用流體 |
空氣3~7 kgf/cm2 |
|
|
周圍溫度 |
-5℃~+60℃ (不凍結) |
|
|
給油 |
不需給油 |
|
| 重量 | 0.26~1.42 kg | |

| 長行程平行機械手 WDHL | ||
|
|
||
|
作動方式 |
複動型 |
|
|
缸徑(mm) |
25 |
|
|
使用流體 |
空氣3~7 kgf/cm2 |
|
|
周圍溫度 |
-5℃~+60℃ (不凍結) |
|
| 重量 | 0.72 kg | |

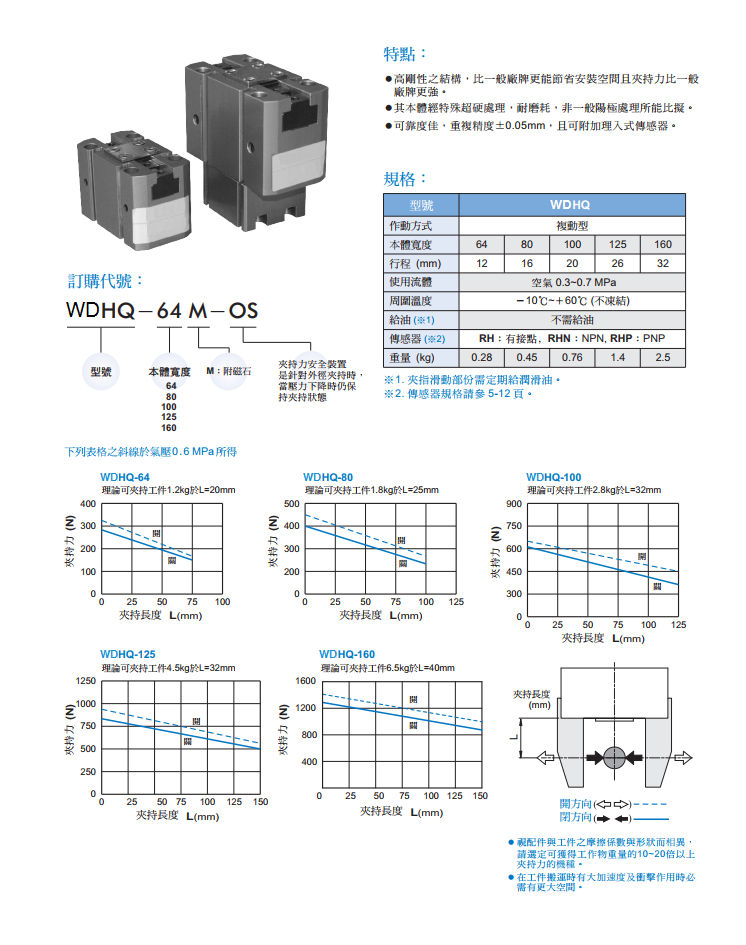
| 超薄平行機械手 WDHQ | ||
|
|
||
|
行程(mm) |
12~26 |
|
|
作動方式 |
複動型 |
|
|
缸徑(mm) |
25,32,40,50 |
|
|
使用流體 |
空氣 3~7 kgf/cm2 |
|
| 周圍溫度 | -5℃~+60℃ (不凍結) | |
| 給油 | 不需給油 | |
| 重量 | 0.28~1.4 (kg) | |

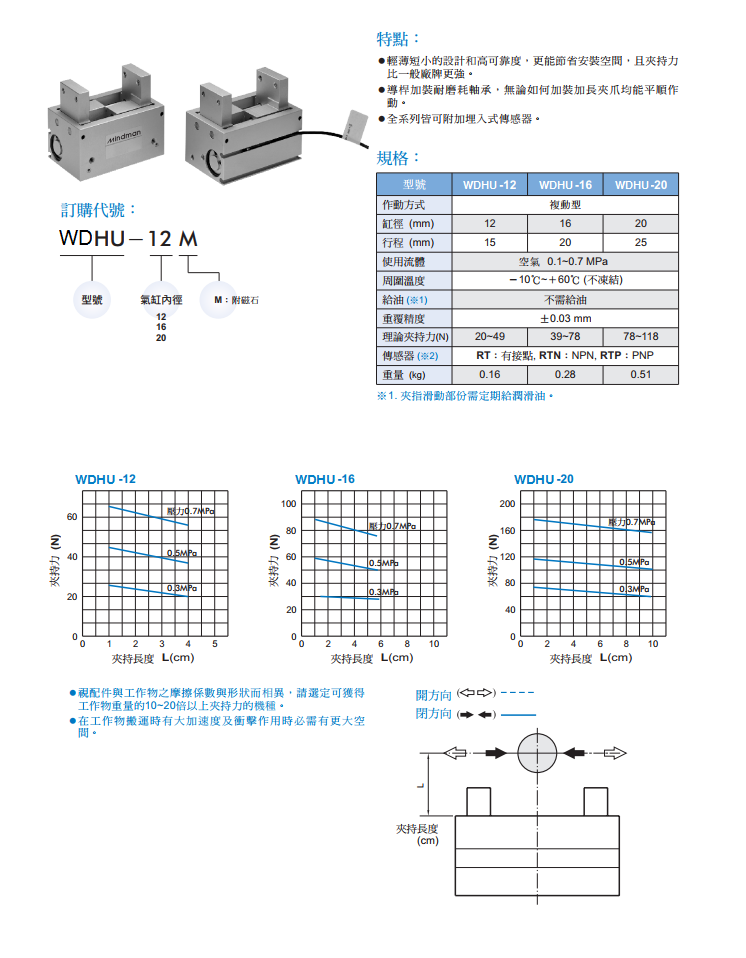
| 小型平行機械手 WDHU | ||
|
|
||
|
行程(mm) |
15, 20, 25 |
|
|
作動方式 |
複動型 |
|
|
缸徑(mm) |
12, 16, 20 |
|
|
使用流體 |
空氣 1~7.1 cm2 |
|
| 周圍溫度 | -5℃~+60℃ (不凍結) | |
| 精度 | ±0.03 | |
| 給油 | 不需給油 | |
| 理論夾持力(N) | 20~118 | |
| 重量 | 0.16~0.51 (kg) | |

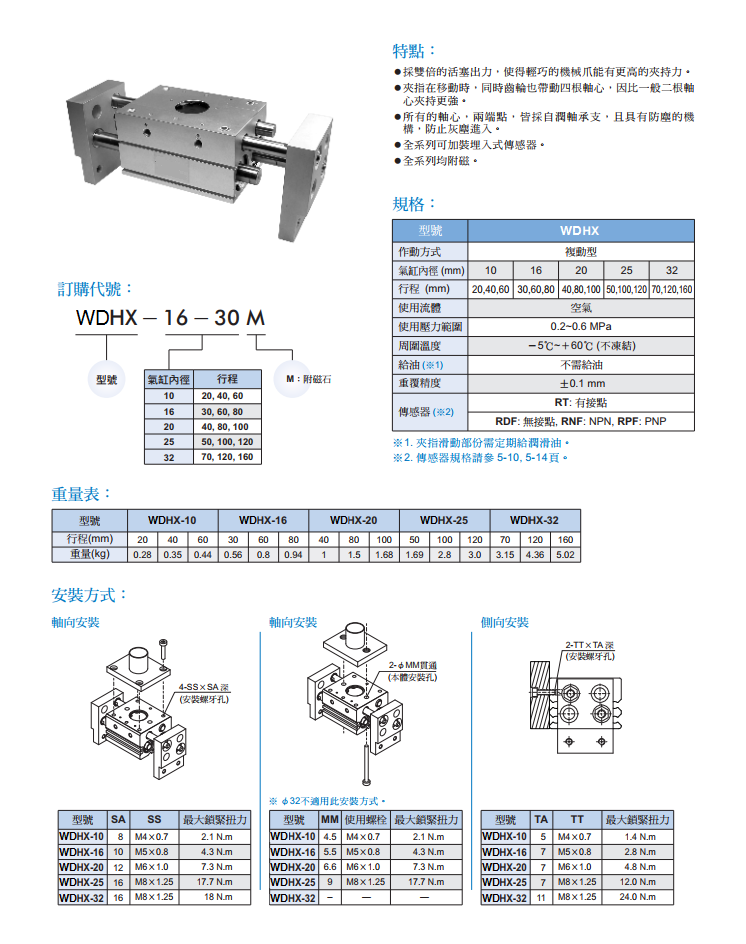
| 寬型平行機械手 WDHX | ||
|
|
||
|
行程(mm) |
30~200 |
|
|
作動方式 |
複動型 |
|
|
缸徑(mm) |
16~40 |
|
|
使用流體 |
空氣 |
|
| 使用壓力範圍 | 1~6.1kgf/cm2 | |
| 周圍溫度 | -5℃~+60℃ (不凍結) | |
| 精度 | ±0.1 | |
| 給油 | 不需給油 | |
